Micro Air Vehicle
autonomous Micro Air Vehicle with Visual Sensor or LiDAR.

I am working on Aerial Robotics, Omnidirectional Vision, Visual Odometry, Mapping,
3D reconstruction, Visual-Inertial Fusion, SLAM, and Quadrotor Autonomous Navigation, Swarm.
I graduated from the UAV Group of the HKUST Robotics Institute,
supervised by Prof. Shaojie Shen.
autonomous Micro Air Vehicle with Visual Sensor or LiDAR.
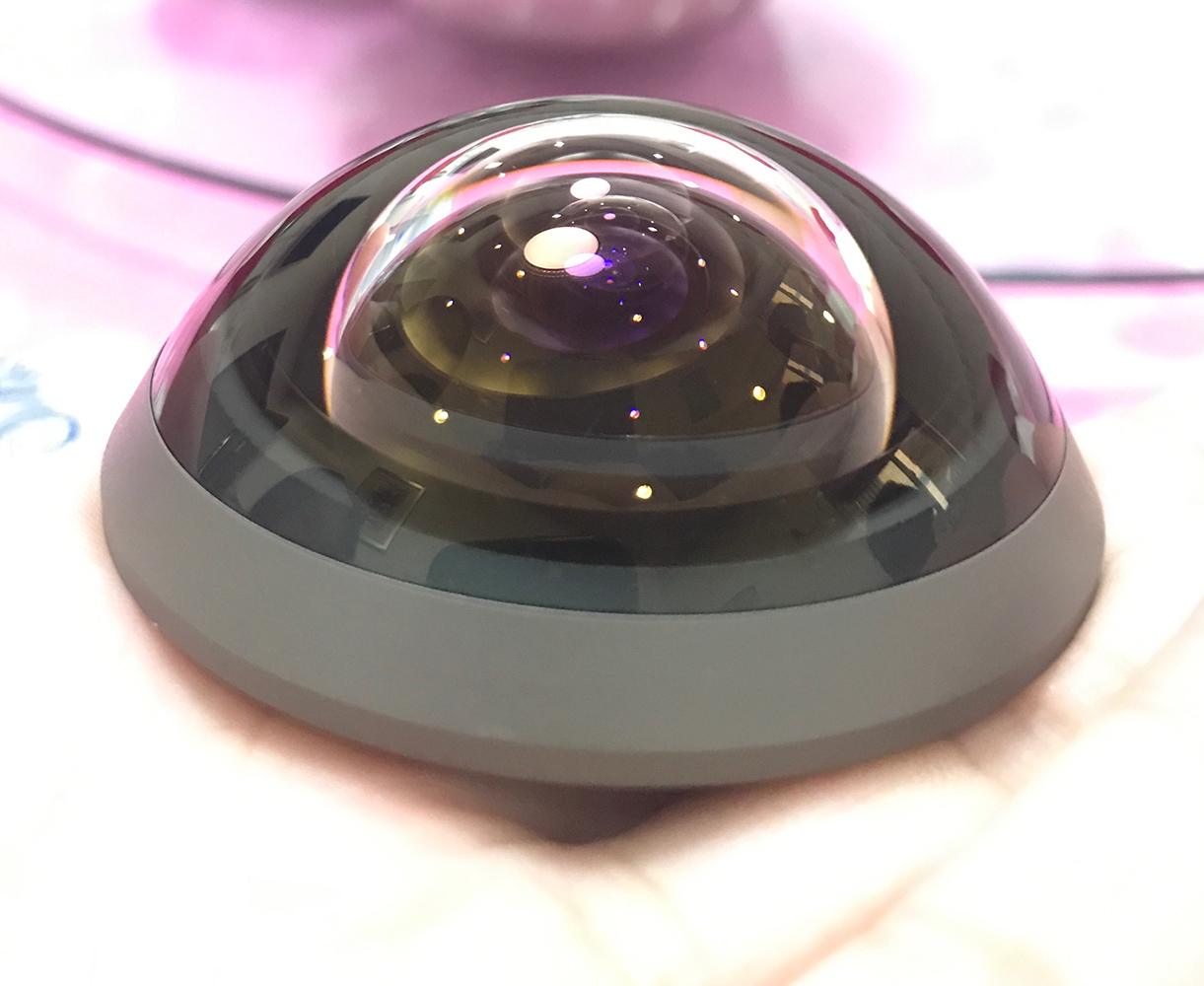
Ultra-wide Field-of-View Fisheye Camera.
Dual-Fisheye Omnidirecional System with two Ultra-wide Field-of-View Fisheye Cameras.
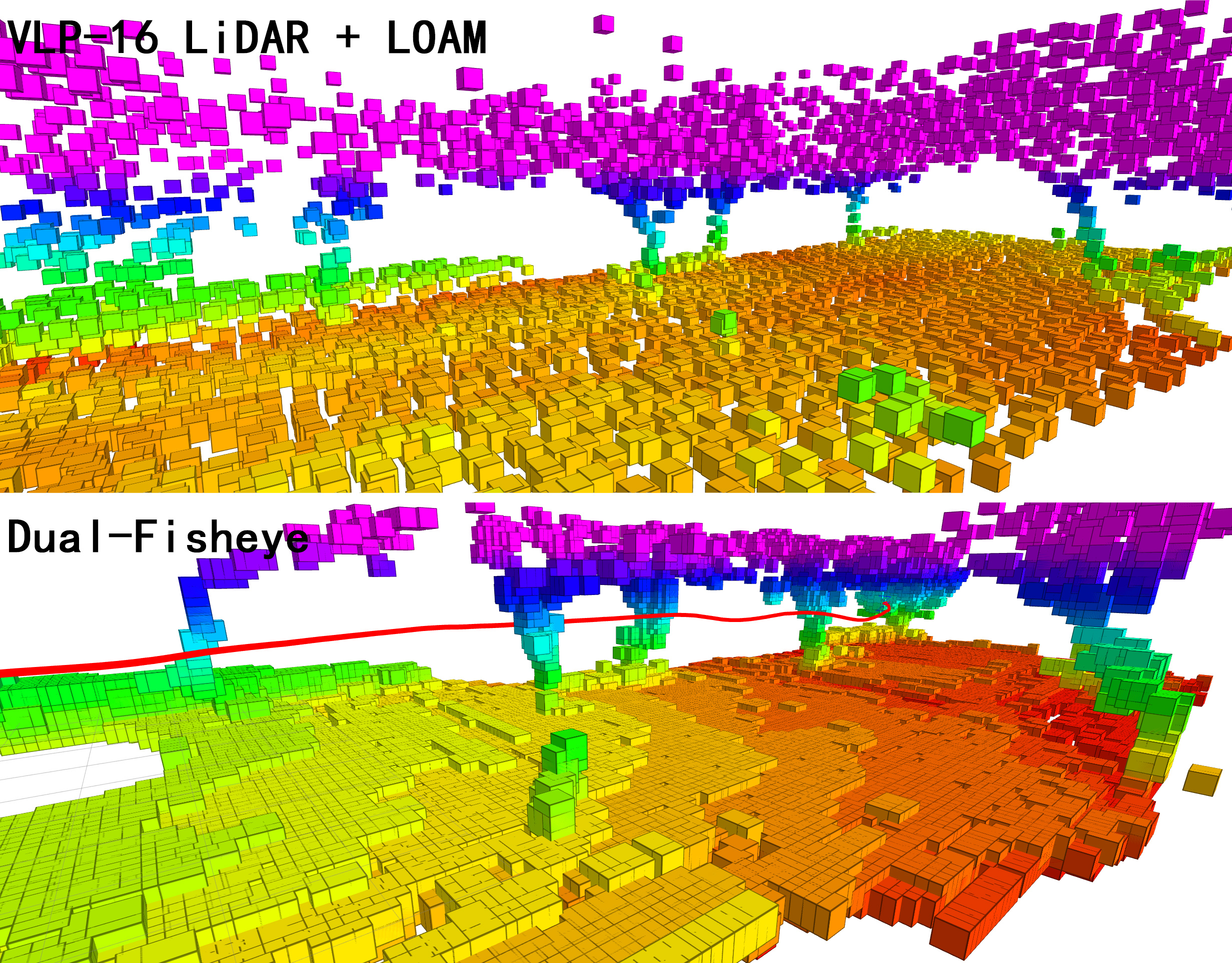
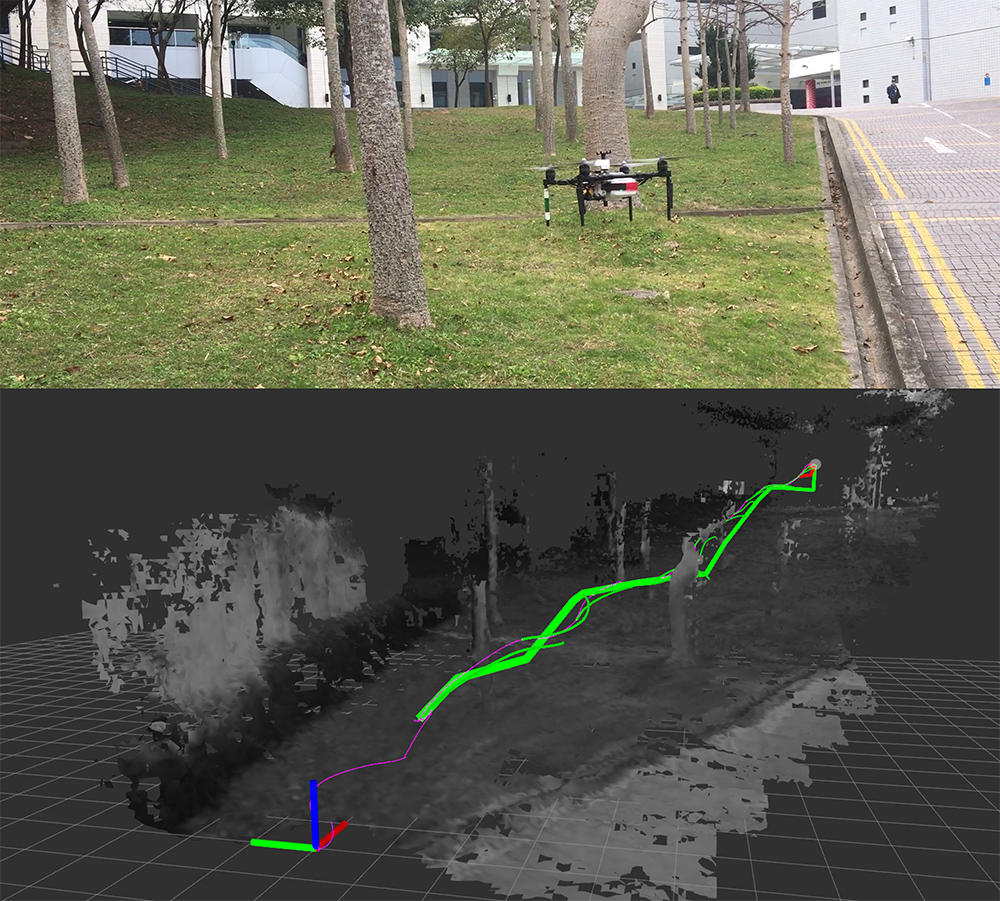
Visual-Inertial Localization and Mapping with Dual-Fisheye System.

Multi-Sensor Fusion: visual, inertial, GPS, LiDAR, etc.
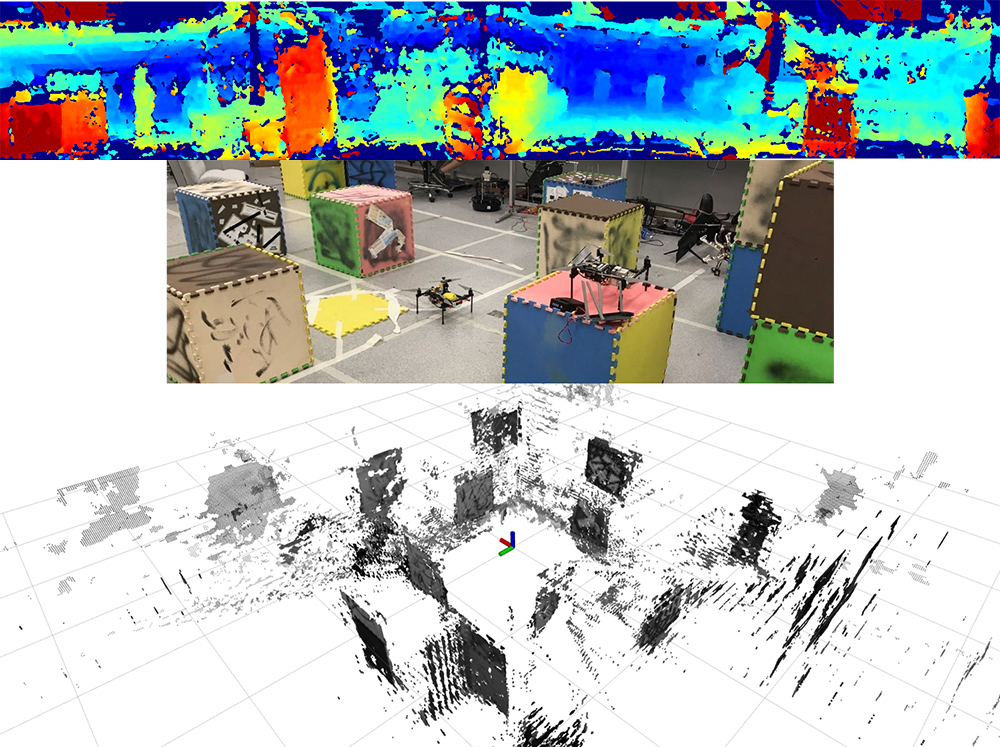
Autonomous Aerial Robot Navigation with Dual-Fiseye Omnidirecional System.
Autonomous aerial robot using dual‐fisheye cameras, Wenliang Gao, Kaixuan Wang, Wenchao Ding, Fei Gao, Tong Qin, Shaojie Shen, 2020 Journal of Field Robotics (JFR). paper
An efficient B-spline-based kinodynamic replanning framework for quadrotors, Wenchao Ding, Wenliang Gao, Kaixuan Wang, and Shaojie Shen, 2019 IEEE Transactions on Robotics (T-RO).
Tracking 3-D motion of dynamic objects using monocular visual-inertial sensing, Kejie Qiu, Tong Qin, Wenliang Gao, and Shaojie Shen, 2019 IEEE Transactions on Robotics (T-RO). YouTube
A GPS-aided Omnidirectional Visual-Inertial State Estimator in Ubiquitous Environments, Yang Yu, Wenliang Gao, Chengju Liu, Shaojie Shen, Ming Liu, 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2019).
A screen-based method for automated camera intrinsic calibration on production lines, Wenliang Gao, Jiarong Lin, Fu Zhang, and Shaojie Shen, 2019 IEEE International Conference on Automation Science and Engineering (2019 CASE).
Flying on point clouds: online trajectory generation and autonomous navigation for quadrotor in cluttered environments, Fei Gao, William Wu, Wenliang Gao*, and Shaojie Shen, 2018 Journal of Field Robotics (JFR). YouTube
Trajectory Replanning for Quadrotors Using Kinodynamic Search and Elastic Optimization, Wenchao Ding, Wenliang Gao, Kaixuan Wang, and Shaojie Shen, 2018 IEEE/RSJ International Conference on Robotics and Automation (ICRA 2018). YouTube
Dual-fisheye omnidirectional stereo, Wenliang Gao and Shaojie Shen, 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017). YouTube bilibili
Autonomous Aerial Navigation Using Monocular Visual-Inertial Fusion, Yi Lin*, Fei Gao*, Tong Qin*, Wenliang Gao*, Tianbo Liu, William Wu, Zhenfei Yang and Shaojie Shen, ( * for equal contribution ), 2017 Journal of Field Robotics (JFR). YouTube
VINS-SO: Stereo-Omnidirectional Visual Inertial State Estimator by Wenliang Gao. A real-time SLAM framework for Visual-Inertial Systems. Support Monocular, Binocular, Stereo and Mixing system. Modified from VINS-MONO.
DFOM: Dual-fisheye Omnidirectional Mapping system. Omnidirectional-Stereo Visual Inertial State Estimator by Wenliang Gao. A real-time Mapping framework for Dual-fisheye Omnidirectional Visual-Inertial Systems.
| Class | Year | |
|---|---|---|
| ELEC 1110 | Introduction to Electro-Robot Design | Under-Graduate/2017 Spring |
| ELEC 5660 | Introduction to Aerial Robotics | Post-Graduate/2017 Fall |
| ELEC 1110 | Introduction to Electro-Robot Design | Under-Graduate/2018 Spring |
 I come from Qujing City, Yunnan Province, southwest China.
I will work in DJI-Innovations after my graduation, in HongKong.
I have some experience in aerial robotics system and gimbal system, include the omnidirectional vision system, calibration and application, autonomous navigation system, state estimation, and controller.
I use C++ programming mostly and a little Python.
I am familiar with OpenCV, ROS etc.
I come from Qujing City, Yunnan Province, southwest China.
I will work in DJI-Innovations after my graduation, in HongKong.
I have some experience in aerial robotics system and gimbal system, include the omnidirectional vision system, calibration and application, autonomous navigation system, state estimation, and controller.
I use C++ programming mostly and a little Python.
I am familiar with OpenCV, ROS etc.
I like to travel and feel the life in my own way. I am willing to take photos and aerial photography, using the drone with my own contribution. I am glad to be somewhere see what happened. I have been to Wenchuan during the 7.10 extra large mountain mudslides in 2013, to touch the true heart after the extreme disaster. I have been to North Korea during the 105th Festival of the Sun(태양절), to understand the people of such closed nation with war stress. I have been to Iran during the Islamic protest in Tehran during the Nowruz Days (نوروز).
If you want to corporate with me or make friends, feel free to contact me using WeChat.