In phase 1 and 2, a controller and trajectory generator are implemented respectively. Phase 3 will focus on path finding and obstacle avoidance.
A* Path Search
Two simple 2D grid maps which contain the obstacles, start and target locations will be provided. You need to implement a 2D A* path search method to find a optimal path with safty guarantee. Then you need to connect all the path points using your previous trajectory generator and control your drone to follow the trajectory. If you design a 3D grid map and extend your A* method to 3D case, you will get bonus points.
Tutorial
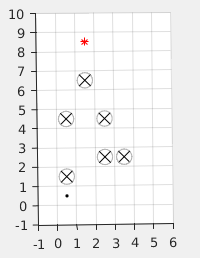
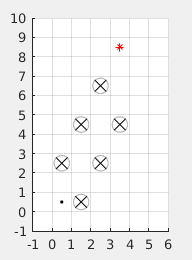
The 2 provided grid maps are shown below. The black dot, circles, red * represent start point, obstacles and goal respectively. The environments are devided into 1 x 1m grids, each grid is represent by the coordinates of the right-top corner. We provide the code to pre-process these map into 2D map array in path_from_A_star.m
Sturcture of the Simulator
The simulation code is almost the same with proj1phase2 but a path_from_A_star.m as the main entry point.
+ code
+ readonly #supposed to be read only
- quadModel_readonly.m #parameters of a 500g quadrotor
- quadEOM_readonly.m #dynamics model of quadrotor.
- run_trajectory_readonly.m #solve the equation of motion, receive desired trajectory,run your controller, iteratively. visualization is also included.
+ utils #useful functions.
- controller.m #You have alredy had a good controller in proj1phase1
- trajectory_generator.m #You have alredy had a good trajectory_generator in proj1phase2
- path_from_A_star.m: #What you need to work with. The code which pre-processes obstacle into a grid map has been given. You need to generate path points using A* and feed the points into trajectory_generator.m
- test_trajectory.m #main entry.