In Project 3, you need to integrate all the works you have done before onboard the drone. Which means you need to run the tag_detect-based localization and EKF on the TX2 to online localize itself. And use the controller to track a pre-defined trajectory.
Click to Download Tutorial Note: Google Drive 百度网盘
Project Assignments
These assignments are required for this project including:
Project Details
In this project, we suppose you have already had a lot of practice in UAV development, system integration and software debugging, so you should try to finish the project by your team cooperation. If you finish the Extended Kalman Filter well, there should not be theoretical difficulties in this project, the remaining work is all about system integration and test. There is one thing should be noticed, that is the frame. Please be careful about the frame, especially how the world frame in your drone's view looks like exactly. Your EKF calculates the pose of quadrotor IMU in the tag world frame. The control node requires the pose of quadrotor IMU in the VICON world frame. You need to convert them(also include the velocity). You `should compare` your pose and velocity with Motion Capture system before the flight. .
Be careful about your drone. Before the autonomous flight, you'd better do some test with the drone on hand to see whether the filter and state estimator is good. Almost all the bugs can be found offline, so please think about what is the problem and how to deal with it, don't just make it crash and crash again.
No new code released this time. All code you need has been released in Project 1 Phase 4 and Project 2.
refrence software
To install and setup the system, you can refrence to: TX2-setup and installROSTX2.
Most softerware you need is in ELEC5660_lab_code. But there maybe some new version have not been merged. You can check and use the newest version. Some of them are: djiros, mocap_optitrack , calib_image_saver, pos_vel_mocap, trajectory_node .
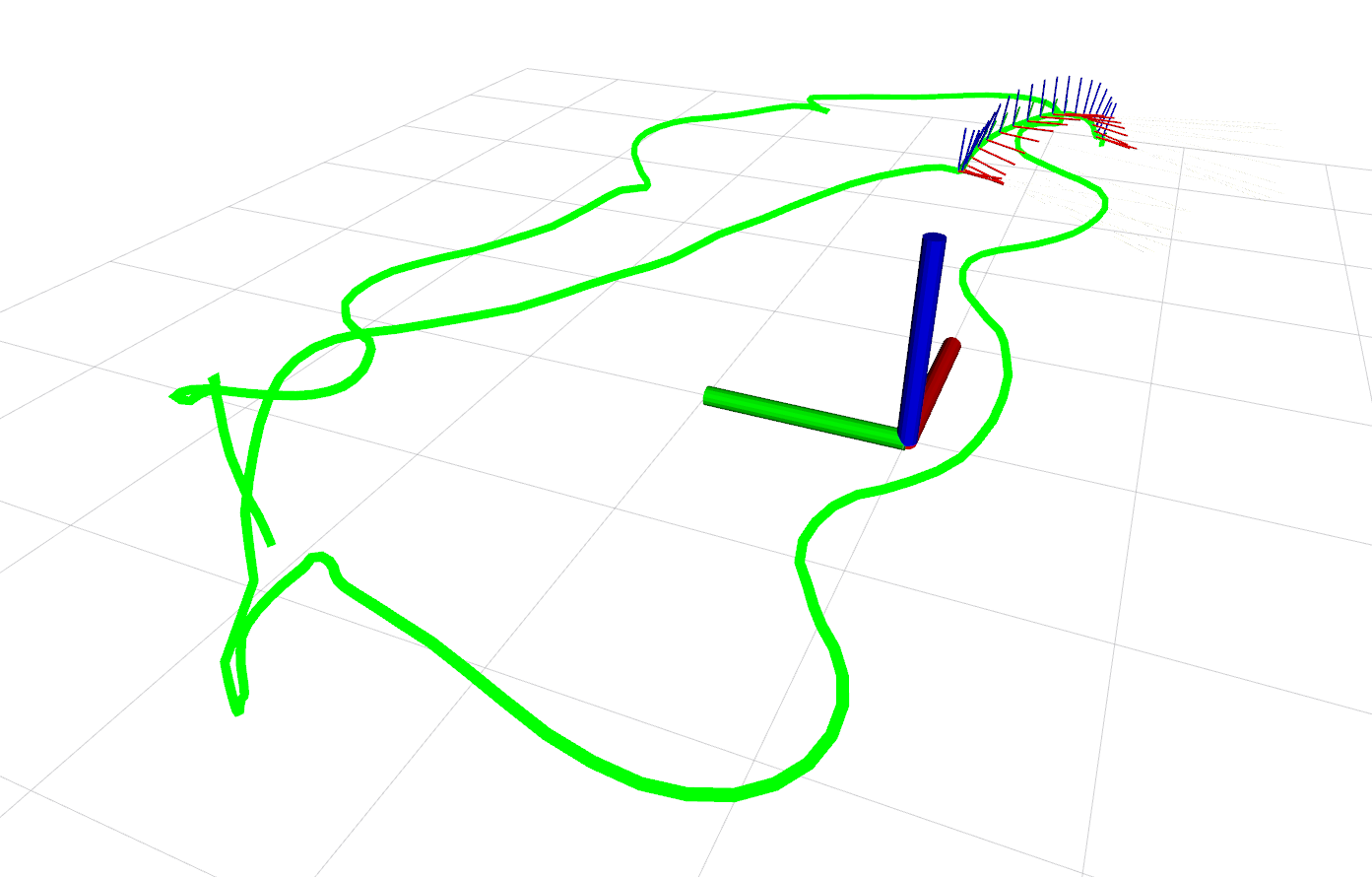
Reference Results
After `EKF` fusion and `frame transform`, result of Project 2 Phase 2 is shown here:

Reference Video (Project of one group in Fall 2017):