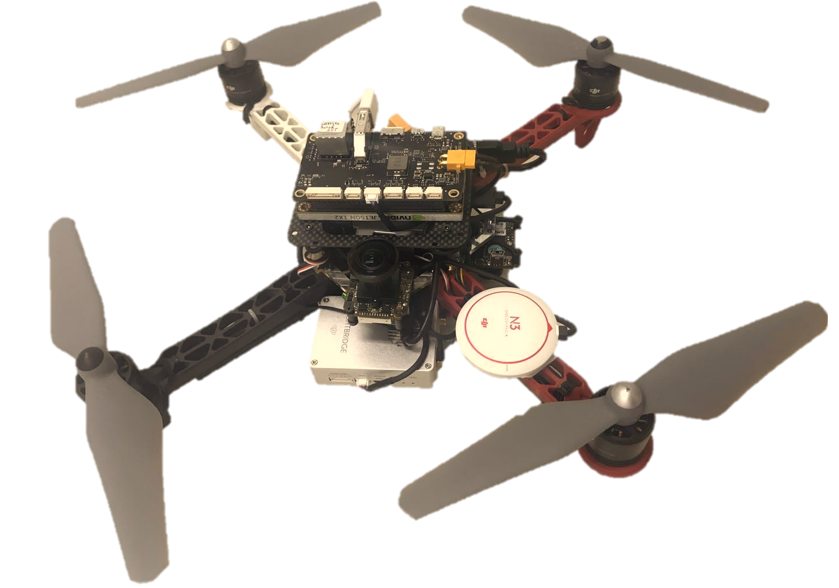
In phase 1, phase 2 and phase 3, a controller, a path finder and a trajectory generator have been implemented based on a quadrotor simulator. It is time for you to test your work on real quadrotors. In phase 4, you will be divided into 10 groups and every group will be provided with a quadrotor, which is equipped with a DJI N3 autopilot and a NVIDIA TX2 mini PC. Every group needs to implement your work on the NVIDIA TX2 and achieves your quadrotor with the ability of hovering and following a designed path stably.
- Click to Download Tutorial Note 1: Google Drive
百度网盘
- Click to Download Tutorial Note 2: Google Drive
百度网盘
Tutorial
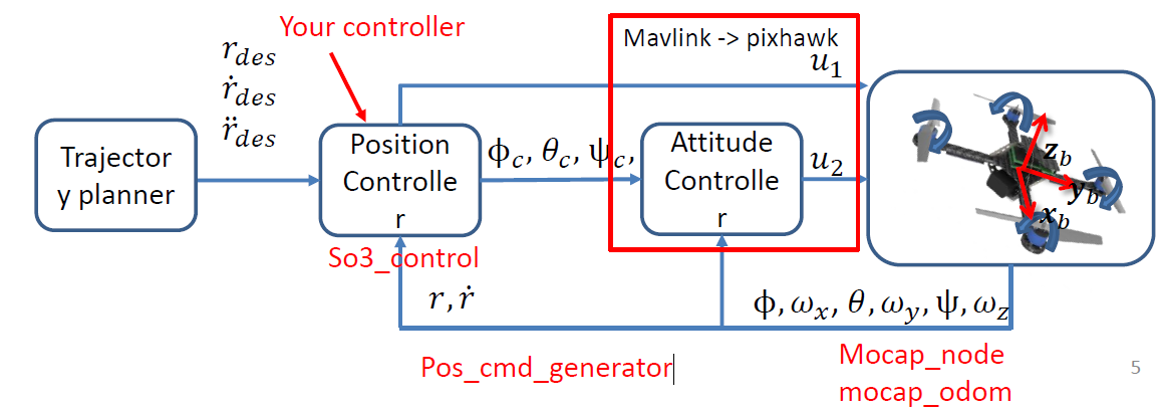
This controller has a little difference with that one in phase 1. Thanks to DJI N3, your quadrotor has already had a good performance in attitude control. The phase 4 controller only needs to transfer desired and true states to attitudes and thrusts of quadrotor, with an assumption that quadrotors can reach the desired attitudes immediately. Despite this difference, this controller also needs to control quadrotor to hover and follow designed paths.
Hovering and Trajectory Tracking
Three assignments are required for phase 3. They include:
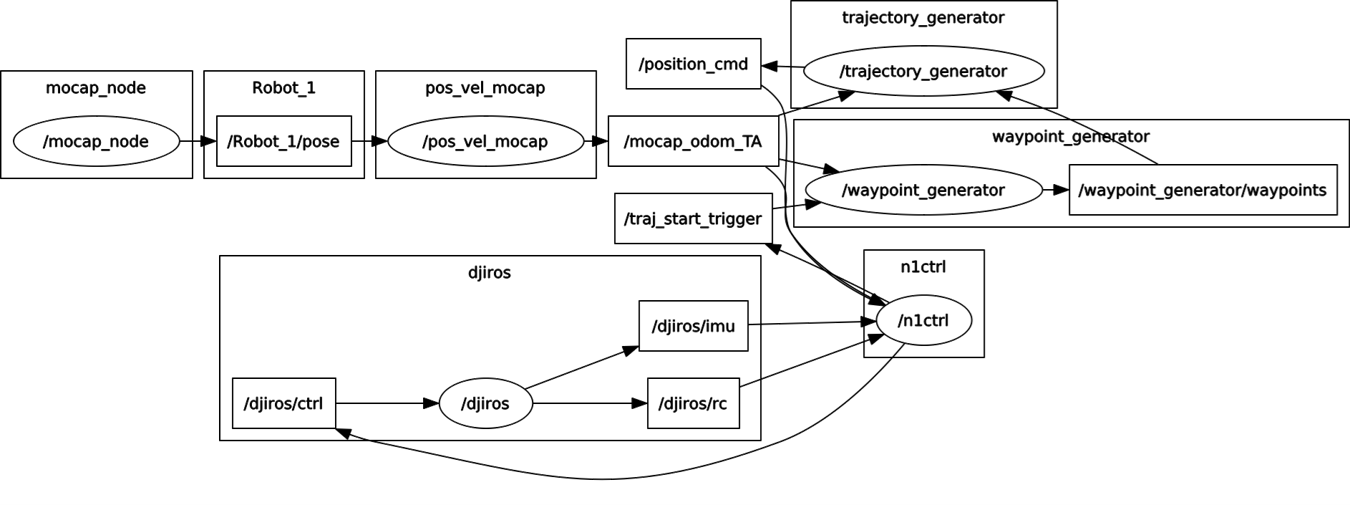
The reference software structure:
The reference drone:
refrence software
To install and setup the system, you can refrence to: TX2-setup and installROSTX2.
Most softerware you need is in ELEC5660_lab_code. But there maybe some new version have not been merged. You can check and use the newest version. Some of them are: djiros, mocap_optitrack , calib_image_saver, pos_vel_mocap, trajectory_node .